Important Information
This is the fun stuff.
Here is a basic FRC Electrical Subsystem:
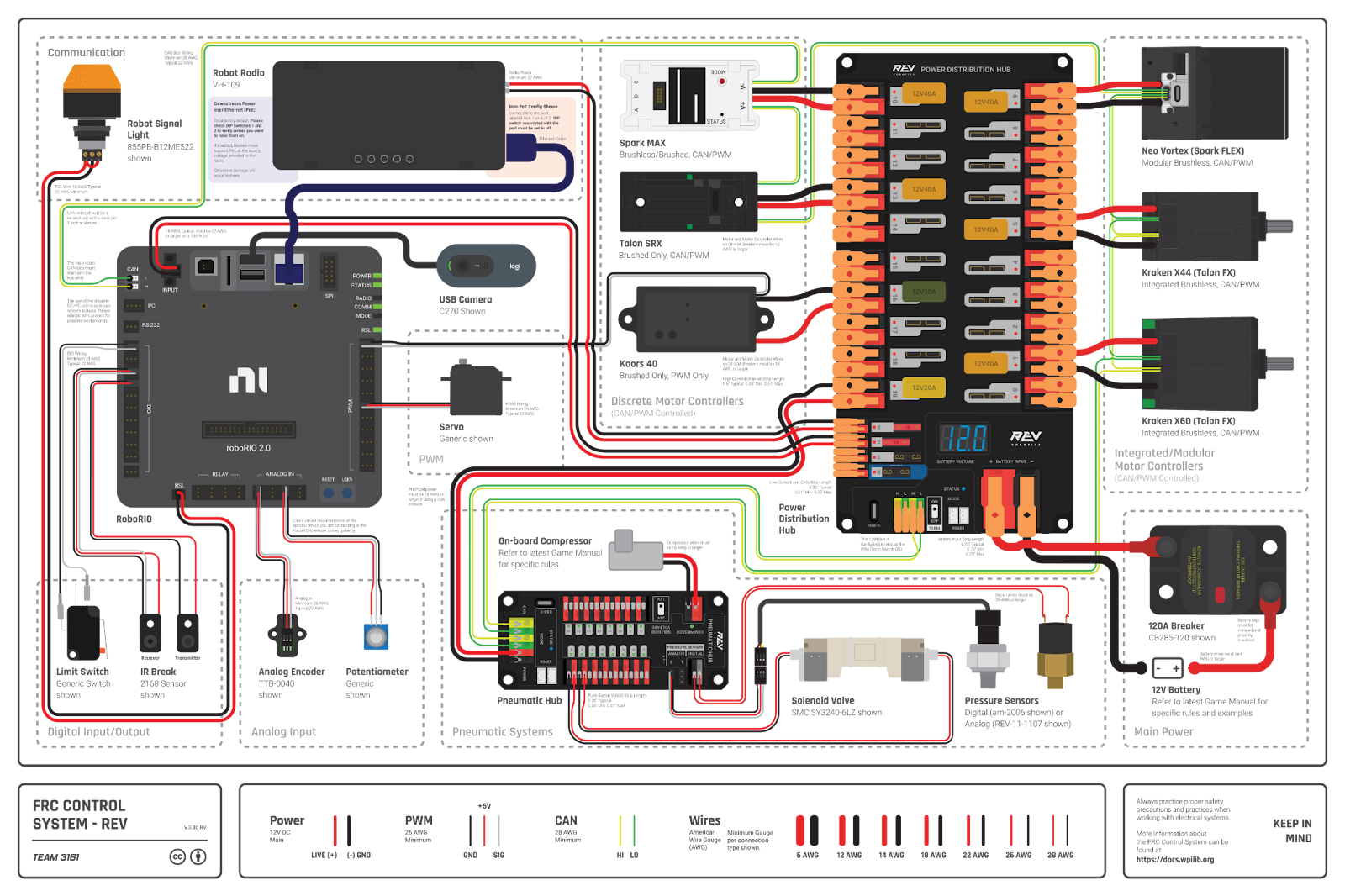
Some of the basic components of the electrical subsystem include:
-
12V Lead Acid Battery
-
Nominal Voltage: 12V
-
Capable of over 180 amps
-
120 Amp Breaker
-
Used to disconnect and connect the battery and prevent the system from drawing too much power.
-
PDH (with its breaker limits)
-
Distributes power from the battery to all components plugged into it
-
Breaker limits current to the component. ( 5 amp - 40 amp options)
-
The mini-fuse is not resettable ( 5 - 20 amps)
-
VRM (Voltage Regulator Module)
-
Regulates the voltage directed from PDH to smaller devices
(limelight, etc)
-
RPM (Radio Power Module)
-
Supplies PoE (Power over Ethernet) for the radio.
-
Radio
-
Communicates with the driver’s station via its WiFi network
-
Connects to VRM for power and Roborio for Ethernet
-
Robo Rio
-
Essentially the brain
-
Any device that needs info must be connected here. Different ports help different devices and their needs
-
RSL
-
Controlled by the RoboRIO
-
Flashes whenever the robot is enabled
-
Stays solid when disabled.
-
CANivore
-
Separates different CAN bus chains.
-
Ex. one for drive and one for upper shooter
-
CANcoder
-
Precisely measures the rotation of a shaft or wheel
-
Integrated within CAN chain
Follow these radio status lights:

LED Status Indications | FIRST FRC Radio
There are different sensors on the robot that can be used in code in order to detect something.
Analog Signals
Smoothly and continuously go through a range of values
Accelerometers create analog signals
Digital Signals
Blocky and steps between two values, 1 or 0
Limit switches create digital signals
Different sensors include
Limelights- A smart camera that makes giving the robot vision simpler. Used for April tag or retro reflective tape detection for targeting scoring elements.
The Pigeon - What angle the robot is at on the X, Y, Z axes. Critical for autonomous or balancing. Able to tell how fast the robot is moving. Tells us exactly what orientation and speed the robot is going.
Encoders- Absolute and incremental. Both types are used to measure the rotation of an axle. Absolute encoders know their angle on startup, while Incremental encoders need to be zeroed
Limit Switch and Mag switches-
Lim: Hitting the top button interrupts or starts the flow of electricity, depending on how it’s wired. Good for hard limits.
Mag: Detects when a magnet is close to the sensor, good for when you don't want something physically touching
Beam Brakes and CANandCOLORs- Uses light to tell if there is an object between the emitter and receiver. Tells how far away an object is by bouncing light off it and recording the time it takes to sense the light. CANandCOLORs measure heat, distance, color, and more!
Linear and Rotary Potentiometers- Uses a change in resistance as the shaft rotates or the slider moves to indicate position or adjust voltage levels
Sensor Types:
-
Rotation
-
Mag Encoders
-
Limit
-
Magnetic/Hall Effect
-
Visual
-
Color
-
Proxy
-
Limelights