# What you need to know
Probably my personal least favorite part of electrical: **Pneumatics**
*Pneumatics: The use of compressed air for quicker and faster movements that a motor can not provide*
Parts:
**Compressor**
Charges air for components on the robot.
**Pressure Switch**
Works with a controller to tell the compressor when to shut off.
**Solenoid Valves**
Electronically controlled valves.
**Pneumatic Controllers**
PH/PCM
Controls the compressor and up to 8 solenoids.
It gains input for a pressure sensor to control the compressor when needed.
CAN based communication
Pressure Switch
Manages amount of pressure in the robot
Acts as “go-between” for the PCM and compressor.
Dump Valve
Releases (or dumps) all air out of the robot.
**Electrical Solenoid Valve(s)**
Actuates the different sides of a pneumatic component such as a shifter or piston. Can be single or double action.
**Compressor**
Charges air for components such as pistons and shifters on the robot. FRC-legal amount of air is 120 psi (pounds per square inch).
**Emergency Relief Valve**
Keeps the air under 125 psi if the compressor or pressure switch is working incorrectly
Pneumatic Practices:
- For cutting tube use a special tube cutter to get clean cuts
- To make seals tight we use 2 and a half layers of teflon tape for brass fitting threads
- Make sure tube don’t kink or fold and don’t touch the tips of tubes
General Pneumatic Layout:
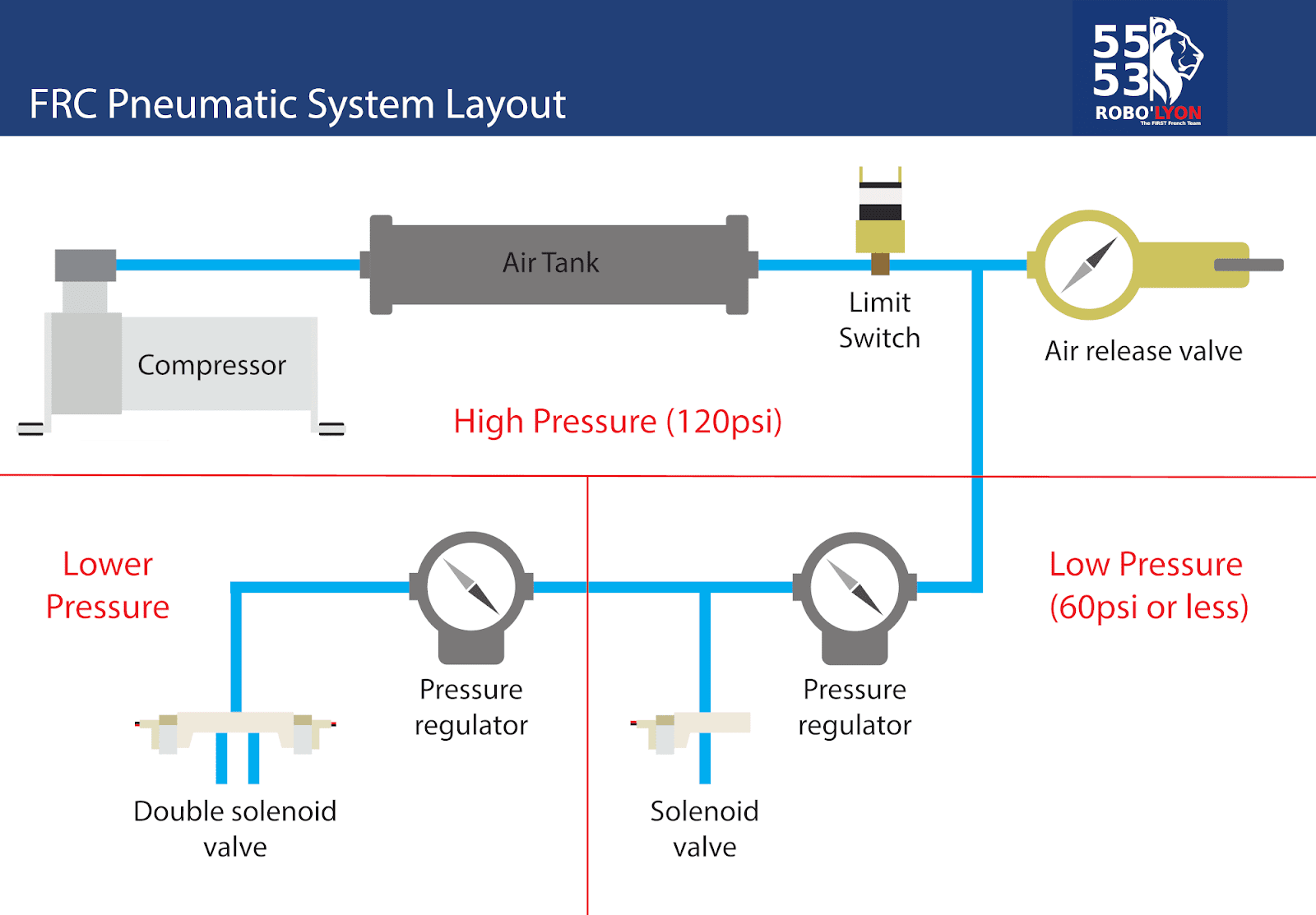
NOTE: We usually don’t use pneumatics unless the robot requires quick movements (in one motion) in a short time span