The Autonomous Period
There are 3 ways we can create autos on YETI:
- PathPlanner
- Choreo
- Composable Functions
This chapter will guide you through using each of these tools to create autonomous paths.
PathPlanner
Overview and Resources:
PathPlanner is a pathing tool developed by team #3015 and is fairly easy to use because of its intuitive, visual nature.
Here are the docs: https://pathplanner.dev/home.html
This page will show you how to effectively use the tool: https://pathplanner.dev/gui-editing-paths-and-autos.html
If you have any questions, consult the docs first. They usually contain the answers you desire.
Some of the most important aspects of PathPlanner are:
Rotation Targets:
Rotation targets define points along the path where the robot should target a given rotation. When path following, the robot will look ahead for the next rotation target, then attempt to rotate to its associated rotation. Rotation targets can be edited in the rotation targets tree. This is only available when holonomic mode is on.
Essentially, this means that you can dictate what direction the robot is facing at any point along the path. This is useful in cases when you want to point your intake towards game pieces on the floor, as many teams did with the notes in 2024.
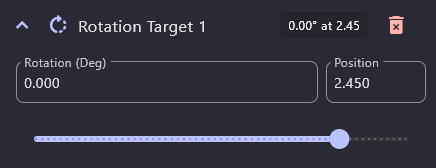
You can use the Rotation (Deg) box to change the heading of the robot and the position slider or the Position box to change at what point along the path you want the robot to be at that heading.
Event Markers
Event markers define points along the path where other commands should be triggered while path following.
This means that you can run commands, such as intake or shoot, at desired points along the path. Check the docs for further instructions regarding this.
Other Important Aspects to Consider
- Waypoints
- Path Optimization
- Command Groups
- Global Constraints
Choreo
Overview and Resources
This tool was created by a developer group called Sleipnir
Here are the docs for Choreo: https://choreo.autos/
This guide will walk you through how to use Choreo: https://choreo.autos/usage/editing-paths/
This page will be further updates as we start to use and experiment with Choreo!
Pathplanner vs Choreo
Overview
Pathplanner and Choreo are two solutions to generating paths in the autonomous period, and they are quite similar in many respects. At the time this page is being written (Summer 2025), YETI doesn't have experience with using Choreo. Therefore, it is important to understand the distinction between the two tools and their potential advantages and disadvantages when making decisions on what to use.
Fun Fact: FRC #3015, the team that created Pathplanner, actually uses Choreo instead of Pathplanner!
CD Threads: https://www.chiefdelphi.com/t/choreo-vs-pathplanner/467373