Shooter Designs
Projectiles in FRC: A Practical How-To Guide
1) Pick a launcher style (pros/cons & when to use)
-
Hooded flywheel (single/dual wheel): Most common, accurate over a range; add an adjustable hood for multiple shot locations.
-
Good for balls/notes.
-
To achieve backspin on the game piece, use one flywheel.
-
For flat spin and front spin, use two flywheels. Chief Delphi+1
Hooded shooter built by 1678
-
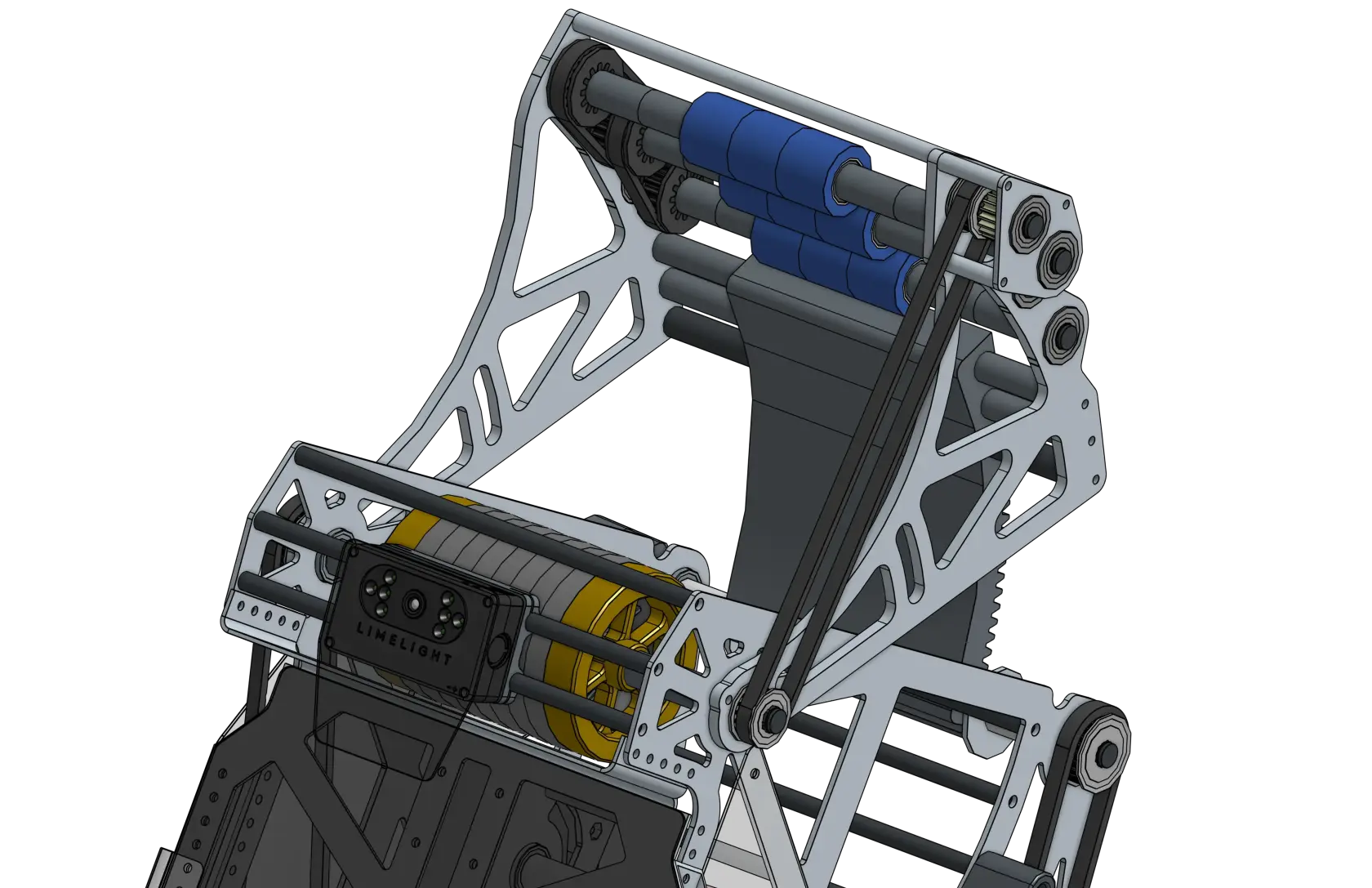
Catapult/puncher (spring/elastic/motor-latched): Great for heavier/softer objects or when you want consistent
““set-shot”shot” distances; needs careful energy storage & release sizing. -
A common mechanism for tension-based launchers is the choo-choo.
-
This works similarly to a train wheel, where a wheel rotates and at a certain point, it will engage a linkage, priming it.
-
It will then rotate and let go of the linkage, releasing energy. Chief Delphi+1
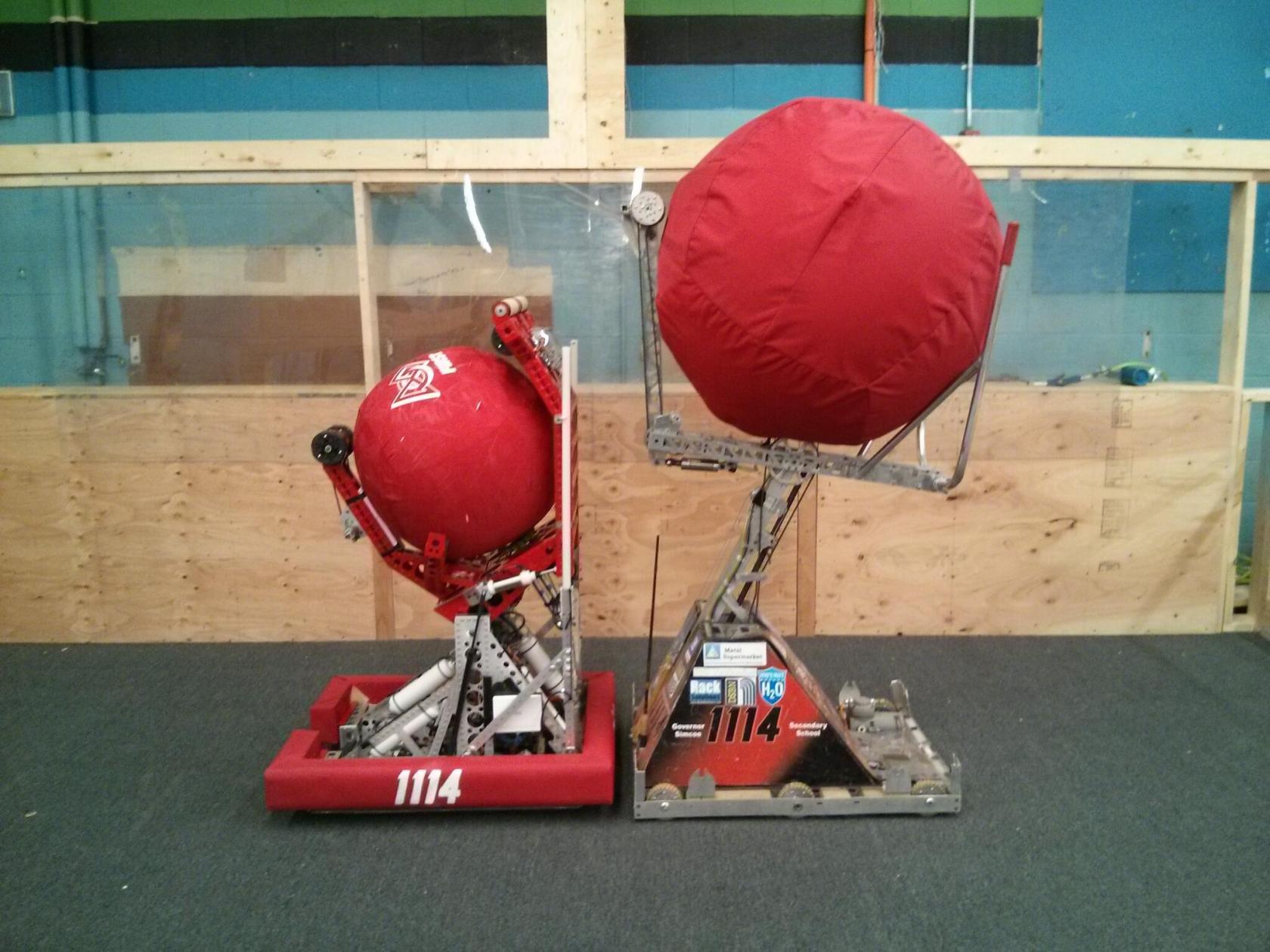
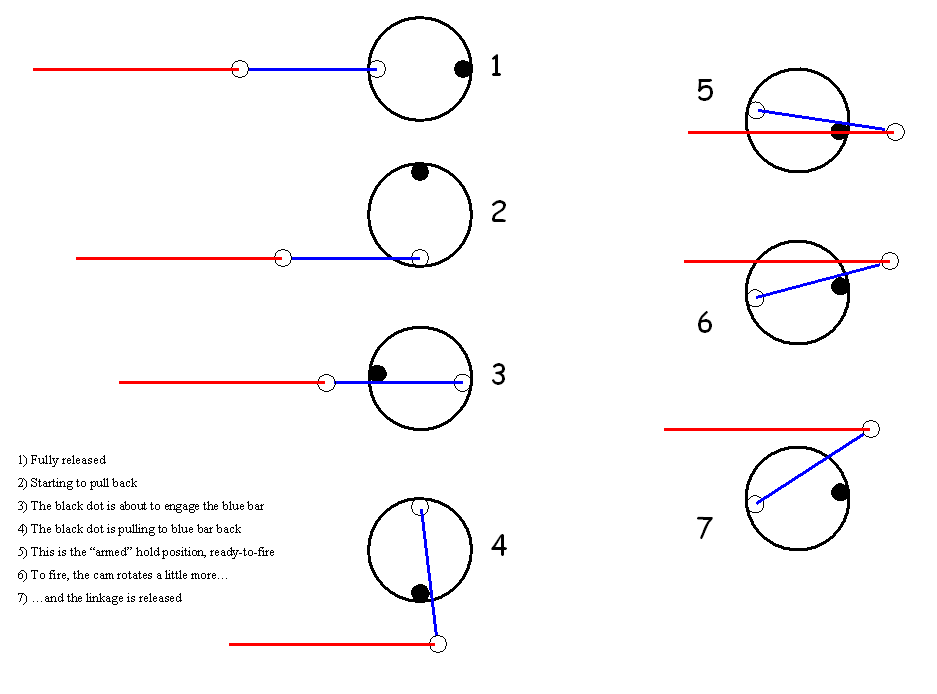
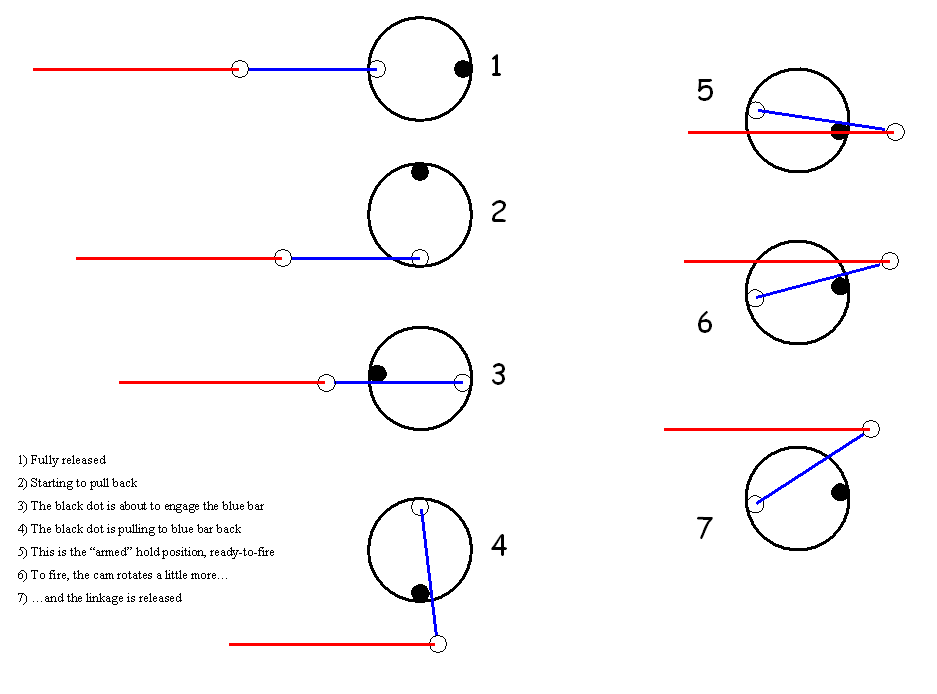
Puncher built by 1114 Choo-Choo mechanism diagram
-
Turret vs. fixed: Turret simplifies driver alignment and allows shooting while driving; a fixed shooter is lighter and simpler.
-
A fixed shooter will use its drivetrain (usually swerve) to aim.
-
Fixed shooters will commonly use a two-plate design.
-
Turret shooters also may have to be zeroed before each match. (See
254’254’s turreted designs & feeder integration.) Chief Delphi+2media.team254.com+2

Turret shooter built by 254 Fixed shooter built by 2910
2) Shooter geometry & compression (for hooded flywheels)
Goal: Control contact time and spin so the game piece leaves at a repeatable speed/angle.
How to:
-
Start with compression: Distance from wheel to hood smaller than the game-piece diameter. Typical starting point many teams reported in 2020: ~1.
5–5–2.5 in; tune per game piece. Chief Delphi+1 -
Choose hood material: Polycarbonate is common; grippier liners increase spin if the piece slips on the hood. Chief Delphi
-
Wheel diameter & inertia: Bigger wheels give higher surface speed at the same RPM and generally more energy storage (flywheel effect); trade against weight & packaging. Chief Delphi
-
Adjustable hood: Enables one mechanism to hit multiple distances/angles; CAD your arc so the normal force and compression stay reasonable across angles. Chief Delphi
-
Rear
“kicker”“kicker”/pre-spin roller (optional): Can improve feeding and reduce shot-to-shot variation; prototype to validate. Chief Delphi
3) Motors, gearing, and energy
How to:
-
Pick motor(s) to match your RPM/torque needs (NEOs/Falcons/775pros). Prototype one motor, log RPM recovery, then scale; example community configs exist (e.g., multi-775pro setups). Chief Delphi
-
Gearing: Target a no-load free-speed
that’that’s10–10–30% above your on-shot speed to allow headroom for control. -
Flywheel inertia: Add mass (steel plates or heavy hub) for better velocity hold-up during a
shot—shot—balance vs. spin-up time. (See CD compression threads discussing plate“disks”“disks”.) Chief Delphi
4) Feeding, centering, and serialization
Why it matters: Consistent entry orientation & speed reduces shot variance.
How to:
-
Center & single-file: Use
“serializer”“serializer” rollers/geometry to turn wide intakes into a single, well-registered stream. (Great example write-ups in 254 tech binders.) media.team254.com+1 -
Metering sensors: Beam breaks/hall sensors before the shooter to time the feed when RPM is on-target.
-
Isolation: Use compliant wheels and passive rollers to control the ball and avoid jams before the throat. media.team254.com
5) Control: getting repeatable velocity (and fast recovery)
Core strategies you can implement in WPILib:
-
Bang-bang: Simple on/off for hitting setpoint
quickly—quickly—great baseline. FIRST Robotics Competition Documentation -
PID/FF velocity control: Use
WPILib’WPILib’s tuning flow; characterize kS/kV/kA, then add PID for disturbance rejection. FIRST Robotics Competition Documentation -
State-space (advanced): Model-based control for excellent disturbance handling and recovery. WPILib has an end-to-end flywheel walkthrough. FIRST Robotics Competition Documentation
Practical steps:
-
Characterize the shooter (SysId or logged step tests) and compute feedforward. FIRST Robotics Competition Documentation
-
Tune: hit open-loop near the target, then close the loop; verify recovery time between rapid shots. FIRST Robotics Competition Documentation
-
Disable motor-safety for flywheels (keeps them spinning during control loops). FIRST Robotics Competition Documentation
6) Trajectory, spin, and aim
How to:
-
Backspin/topspin: More backspin often stabilizes flight and can help
““drop-in”in” style goals; tune with hood friction and wheel-hood speed ratio. Chief Delphi -
Distance tables: Build RPM/hood-angle lookup tables per
range—range—collect data at marked distances, interpolate in code. -
Turret/hood strategy: Decide
““fixed hood + turret +velocity”velocity” vs.““adjustable hood + fixedshooter”shooter” based on game tasks and protected zones. (Notes from Spectrum & 2024 meta.) Chief Delphi
7) Catapults & punchers (elastic or motor-latched)
How to:
-
Pick energy storage: Surgical tubing, gas springs, torsion springs; estimate spring rate and energy (
½½ kx²x²). Old but useful CD references give ballpark tubingrates—rates—always validate on a test rig. Chief Delphi -
Size the actuator/gearbox: Use a simple simulation or spreadsheet to match wind-up torque, angular speed, and release angle (see
““Electric Catapult Design &Optimization”Optimization”). Chief Delphi -
Latch & release: Robust hard latches or dog clutches; ensure pre-load
can’can’t self-release and add physical hard-stops. -
Cycle time: Design for safe reset under defense (ratchets or worm-gear holds).
8) Prototyping plan (fast & reliable)
How to:
-
Bench rigs first:
2×2×4 frame, adjustable hood arc, sliding wheel-to-hood distance. Swap wheels/materials quickly. -
Log everything: RPM before/after shot, time-to-recover, ball exit speed (phone high-fps), hit rate vs. distance.
-
Parameter sweeps: Try compression steps (e.g., +0.25 in), wheel durometer, hood liners, release
angles—angles—record a matrix. -
Durability checks: Shoot 100+ cycles and re-measure your
“dialed”“dialed” values to see drift (wheel wear, liner glazing).
Resources with examples & prototyping ideas: Spectrum resources hub and build blogs. spectrum3847.org+1
9) Software integration: from sensor to shot
How to:
-
Sensor suite: Encoder on flywheel; beam break at exit; gyro/odometry for range estimate; (optionally) vision for pose/aim assist.
-
Shot gating: Only feed when
abs(vel - setpoint) < tolerancefor N ms. -
Auto-aim options: Turret PID to vision target or odometry-based
““dead-reckon”reckon” withdistance→distance→RPM/angle tables. (WPILib control tutorials cover tradeoffs.) FIRST Robotics Competition Documentation
10) Mechanical details that matter
-
Stiff mounting: Shooter & hood need rigidity (avoid deflection changing aim). Elite teams detail robust interfaces between turret and shooter. Chief Delphi
-
Ball path sealing: Close gaps so you
don’don’t lose pressure/energy. -
Serviceability: Quick-change wheels/liners; access panels for cleaning debris.
-
Safety: Shields around flywheels; never stand in plane of the wheel; interlocks for test mode.
11) Strategy fit & on-field use
How to:
-
Decide shot families
you’you’ll own (e.g., protected zone,““subwoofer,”” mid-field). 2024 takeaways: multi-location shooting boosts cycle flexibility but increasescomplexity—complexity—picking one or two money shots can still be very effective. Chief Delphi -
Warm-up & calibration: Spin up on enable; auto-zero hood; shoot a short drill to confirm RPM table after field reset.
-
Maintenance: Re-index compression (liners wear), check set screws, re-true wheels weekly.
12) Build-season checklist
-
Define target ranges/angles and cycle goals (with strategy).
-
Select launcher type; CAD the geometry (arc, compression, packaging).
-
Prototype quickly; collect a data table and pick initial control strategy.
-
Integrate a reliable feed path with sensors.
-
Lock in materials, fasteners, guards.
-
Code gating & recovery; validate with drill cards (e.g., 10 rapid shots at 2 ranges).
-
Create pit procedures for inspection, alignment, and upkeep.
Suggested ““Further Reading”Reading” blocks for your wiki
-
WPILib: Tuning a flywheel, state-space flywheel control, strategy choice. FIRST Robotics Competition Documentation+2FIRST Robotics Competition Documentation+2
-
Spectrum 3847 resources and build blogs (design slide decks, prototyping ideas). spectrum3847.org+1
-
ChiefDelphi canonical threads on hood geometry, compression & materials. Chief Delphi+3Chief Delphi+3Chief Delphi+3
-
Catapult math & examples. Chief Delphi+2Chief Delphi+2
-
Elite team tech binders for feeder/serializer & turret integration. media.team254.com+2media.team254.com+2