Akit File Structure
Overall Structure
When implementing akit into your robot code, you need always need four files for each subsystem: the configs file, the input output interface, input output class, and the subsystem file. For subsystems that move, such as an elevator, you also need an enum for positions.
Configs File
This file lists out all the configurations for the motors and sensors in the subsystem. It includes tuning constants, motor and sensor IDs, motor configs, and any motion magic requests you might need.
Subsystem configs:
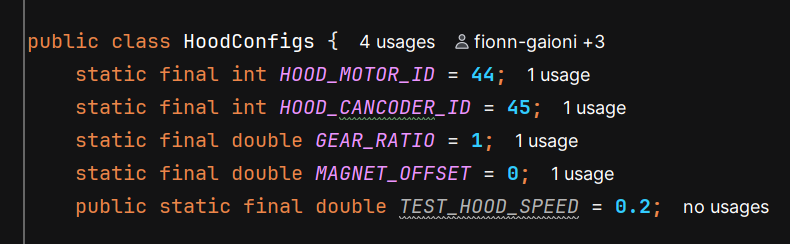
Tuning settings:
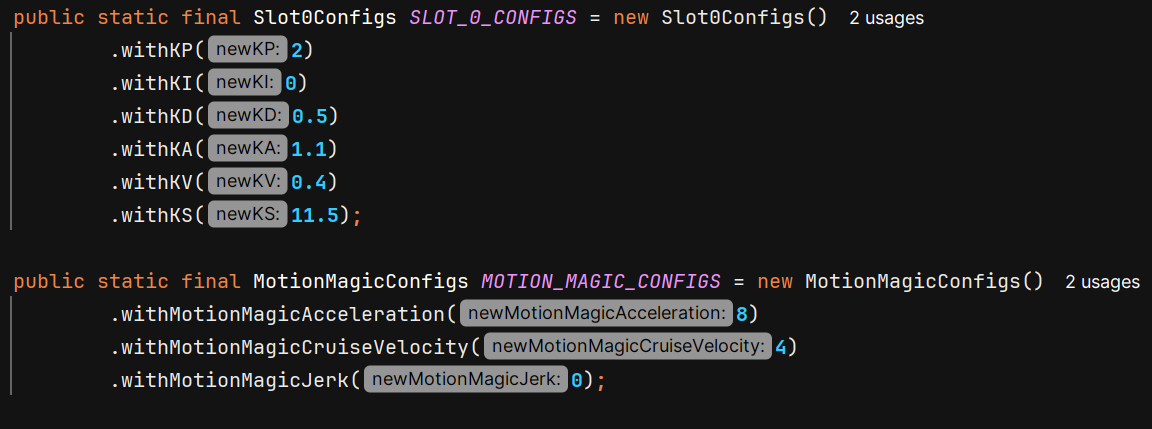
Motor configs:

Canrange configs:
