Down The VelocityTorqueCurrentFOC Road
How to tune for Velocity
We like to use MotionMagic because it makes speed changes smoother! We use MotionMagic for basically all of our motion profiles.
When using a velocity profile, you are trying to get the motor to spin at a specific velocity instead of a rotating specific amount of rotations.
The Plot
|
In Phoenix Tuner, plot Velocity (rotations/sec) and Acceleration (rotations/sec2). |
|
Then also plot Reference (rotations/sec) and ReferenceSlope (rotations/sec2).
Make sure the Reference and ReferenceSlope are from PIDVelocity (not PIDPosition)
Gain Configurations
Motion Magic
-
Start with the MotionMagic configs
-
We don't use the cruise velocity gain in a velocity profile because we are trying to get to a target velocity, not this velocity we are setting
-
Make cruise acceleration 4, and double from there after more tuning
-
FeedForward and FeedBack
Try to minimize the amount of feedback gains while tuning, but use them if necessary
-
kS
-
Set to 1 and start doubling (use binary searching to get the optimum value)
-
We are trying to get the smallest kS possible before the motor starts turning
-
-
kA
-
Change it based on the Reference and our current Velocity signals
-
The steeper the slope of the Reference, the more we have to increase kA in order to get the Velocity to match it
-
A steeper slope means a higher kA and vice versa
-
-
kV
-
After getting the Velocity to peak along with Reference, it's time to raise kV
-
Increase kV until the Velocity line stays straight and is closely matching the Reference
-
These should get you pretty close to the Reference line - change kP and kD a little bit to get to your desired accuracy!
Specifics for Flywheel Tuning
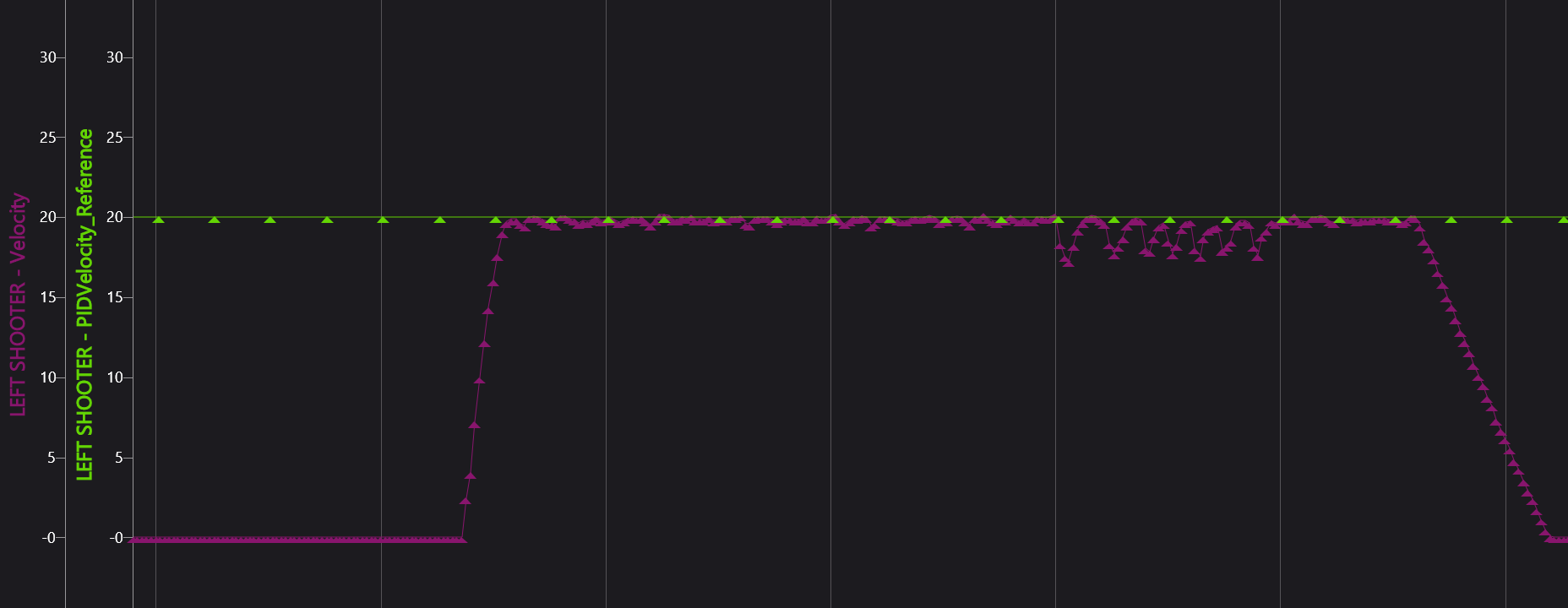
While tuning flywheels, we are trying to get the motor to get to its target as fast as possible. When a game piece (such as a ball) goes through it, it should take as little time as possible to ramp back up to speed.
-
To do make the motor reach its target faster, keep on doubling the Cruise Acceleration until it reaches the speed quickly
-
For Rebuilt, we decided that less than a quarter second was optimal for reaching the target
-
Decrease kS and kA little by little until the initial ramp up speed matches the profile (doesn't have to be perfect)
-
-
To make the motor ramp back up quicker, you have to tune other gains a little more
-
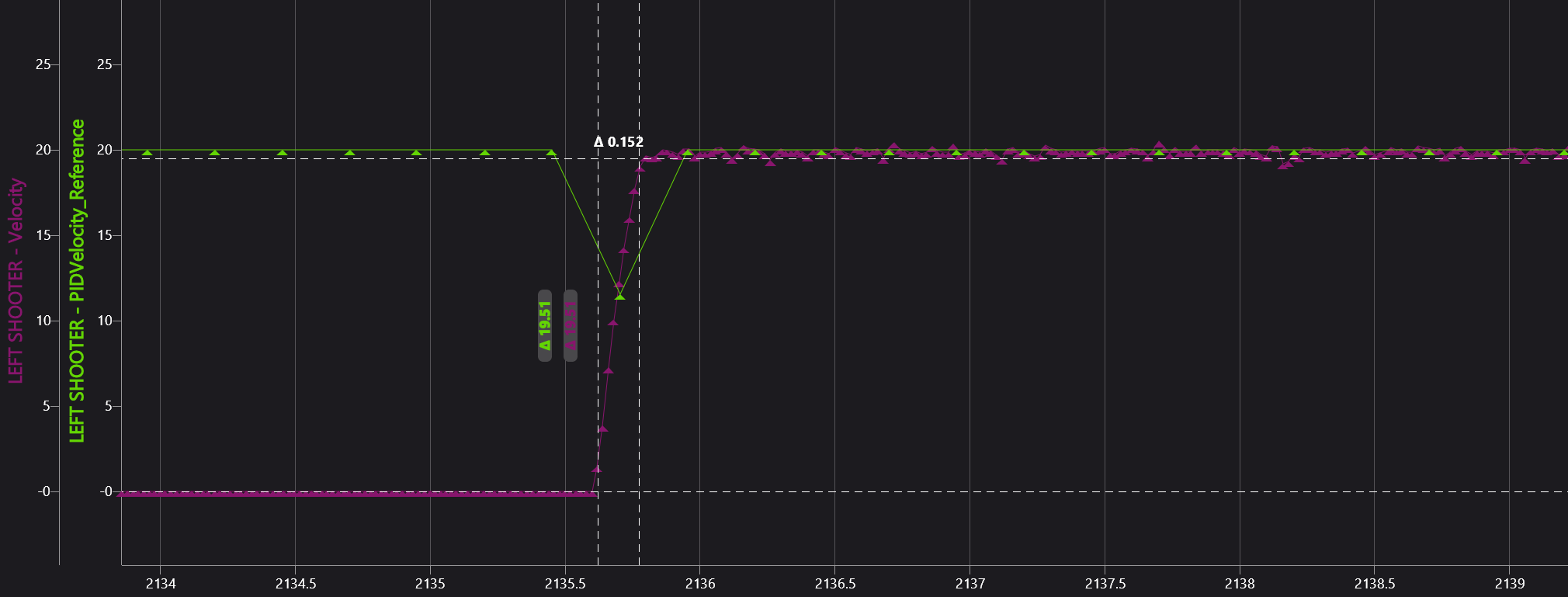
If game pieces are going through in quick succession as the velocity slows down by a lot, then you need to increase kP and kD
-
Double kP a couple times until the motor doesn't dip as far down in velocity
-
If there is too much oscillation now, increase kD a little bit
-
-
Remember: kP makes the motor move faster if the error is bigger, and kD resists changes to the motor's velocity
-
-
For Rebuilt, we decided that less than a 10th of a second was good for the motor to ramp back up to speed
-
No Comments